 加载中…
加载中…基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法
引用本文
韩月起, 张凯, 宾洋, 秦闯, 徐云霄, 李小川, 和林, 葛建勇, 王天培, 刘宏伟. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法. 自动化学报, 2020, 46(1): 153-167. doi: 10.16383/j.aas.2018.c170287
HAN Yue-Qi, ZHANG Kai, BIN Yang, QIN
Chuang, XU Yun-Xiao, LI Xiao-Chuan, HE Lin, HE Lin, GE Jian-Yong,
WANG Tian-Pei. Convex Approximation Based Avoidance Theory and Path
Planning MPC for Driver-less Vehicles.
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170287?viewType=HTML
文章简介
关键词
无人驾驶车辆, 路径规划, 凸近似, 避障原理, 模型预测控制
摘
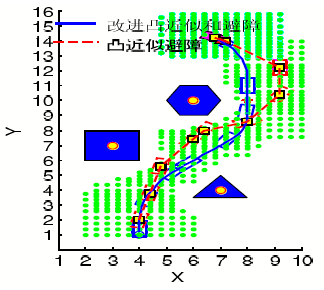
提出了一种改进的无人驾驶车辆路径规划方法, 并搭建了相应的软件在环实时仿真系统, 对方法在结构化道路下的复杂动态交通工况进行性能验证.首先, 引入基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 扩大了路径规划的可行域范围.采用改进后的方法, 并结合模型预测控制(Model predictive control, MPC)原理和曲线坐标系统, 综合考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束、路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等权重的影响, 实现了车辆在复杂动态交通工况下的路径规划.最后, 以长城H7运动多用途车作为无人驾驶实验及仿真平台, 搭建基于dSPACE多核架构的Carsim + Simulink软件在环实时仿真系统, 对算法进行验证.结果表明, 所提出的方法不仅可获得合理、平滑的行驶路径, 顺利避开运动障碍车的干扰, 而且具有良好的实时性.
引
无人驾驶技术不仅可以降低人为的交通事故, 减少拥堵现象的发生, 并且可以提高能源的利用率, 是未来的汽车重要技术发展趋势之一.经过国内外数十年的研究, 无人驾驶技术正由驾驶辅助过渡到全自主驾驶技术的阶段.
作为无人驾驶的关键技术之一:路径规划, 是从起点到终点找到一条无碰撞的可行驶路径.路径规划包括全局和局部两种.全局路径规划主要为局部路径规划提供导向约束, 使车辆沿着导航系统提供的一系列期望局部目标点行驶.而局部路径规划是在车辆沿期望路径行驶时, 通过车载传感器感知周围环境及交通信息, 从而实现车道保持、动态避障等功能.后者对算法的实时性要求较高.由于目前在全局规划算法方面的研究已经获得较为成熟的结果, 本文将主要针对动态交通环境下的复杂工况局部路径规划进行研究.
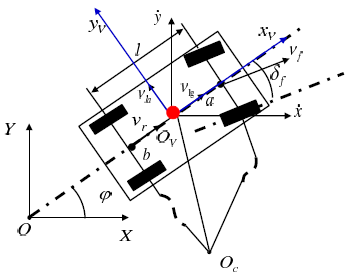
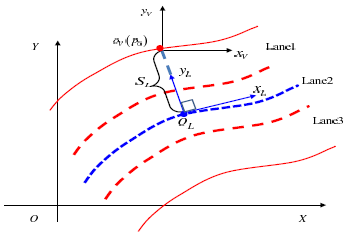
本文以障碍物动态干扰下的结构化道路路径规划为目标, 首先基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 以扩大路径规划的可行域范围.在此基础上, 结合MPC算法和曲线坐标系统, 建立自车的运动学和动力学模型, 以路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等作为权重, 考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束等约束条件, 导出基于MPC的路径寻优二次规划问题, 并基于序列二次规划(Sequential quadratic programming, SQP)方法进行求解. 最后, 以长城H7 SUV作为无人驾驶路径规划的实验和仿真平台, 搭建了基于dSPACE多核架构的Carsim + Simulink软件在环系统SILS (Soft-ware in loop systems). 基于SILS, 针对前方障碍物车辆为静态/动态的直道/弯道复杂道路交通工况, 验证了上述算法具有较好的实时性, 均能使自车安全、平顺、舒适地避开障碍物车辆的动态干扰, 并沿着车道线行驶.
http://image.sciencenet.cn/home/202205/12/101003ljawrgv9np84zvzq.png
{kind=link}
图 1
http://image.sciencenet.cn/home/202205/12/101015pzvz2u5jl1bteb13.png
{kind=link}
图
http://image.sciencenet.cn/home/202205/12/101024u14e9v91ivkee9h3.png
{kind=link}
图
作者简介
韩月起
长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2014年获得山东理工大学学士学位.主要研究为自动驾驶路径规划控制算法设计开发.
E-mail: cyaqdlxkz@gwm.cn
张
长城汽车股份有限公司技术中心智能驾驶系统开发部副总工程师. 2003年获得沈阳理工大学学士学位.主要研究方向为自动驾驶系统设计开发.
E-mail: zhangkai@gwm.cn
宾
工学博士, IEEE会员, 教授.主要研究方向为无人驾驶车辆路径规划/多传感器数据融合技术、燃料电池优化控制, 分布式混合动力电驱动系统, 电流/电压可控双向DC/DC变换器等.本文通信作者.
E-mail: edward.biny@hotmail.com
秦
长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2015年获得华北水利水电大学学士学位.主要研究方向为自动驾驶路径规划算法开发.
E-mail: cyaqdlxkz@gwm.cn
徐云霄
曾是长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2014年获得燕山大学硕士学位.主要研究方向为自动驾驶路径规划算法开发.
E-mail: xuyunxiao@chehejia.com
李小川
长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2015年获得河北工业大学城市学院学士学位.主要研究方向为自动驾驶运动规划与多传感器数据融合.
E-mail: xchuan.l@foxmail.com
和
长城汽车股份有限公司技术中心智能驾驶系统开发部主任工程师. 2006年获得吉林大学车辆工程硕士学位.曾于2006至2014年主导博世第九代ESP系统开发工作.主要研究方向为车辆底盘动态控制, 运动规划控制, 自动驾驶系统多传感器融合, 智能决策.
E-mail: helin@gwm.cn
葛建勇
长城汽车股份有限公司技术中心智能驾驶系统开发部主管工程师. 2012年获得山东理工大学车辆工程学士学位.主要研究方向为底盘动力学控制及自动驾驶系统开发.
E-mail: gejianyong@gwm.cn
王天培
长城汽车股份有限公司技术中心智能驾驶系统开发部主管工程师. 2012年获得北京理工大学硕士学位.主要研究方向为自动驾驶及其关键技术, 数据融合, 决策控制.
E-mail:
刘宏伟
长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2013年获得燕山大学硕士学位.主要研究方向为自动驾驶系统嵌入式开发.
E-mail: liuhongwei@gwm.cn
相关文章
[1]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.02012?viewType=HTML
[2]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190349?viewType=HTML
[3]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190526?viewType=HTML
[4]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180415?viewType=HTML
[5]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170431?viewType=HTML
[6]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160684?viewType=HTML
[7]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150794?viewType=HTML
[8]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150432?viewType=HTML
[9]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00759?viewType=HTML
[10]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00222?viewType=HTML
[11]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01122?viewType=HTML
[12]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01493?viewType=HTML
[13]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2009.01216?viewType=HTML
[14]
http://www.aas.net.cn/cn/article/doi/10.1360/aas-007-1036?viewType=HTML
[15]
http://www.aas.net.cn/cn/article/id/14396?viewType=HTML
[16]
http://www.aas.net.cn/cn/article/id/16286?viewType=HTML
[17]
http://www.aas.net.cn/cn/article/id/16576?viewType=HTML
[18]
http://www.aas.net.cn/cn/article/id/16645?viewType=HTML
[19]
http://www.aas.net.cn/cn/article/id/17214?viewType=HTML
[20]
http://www.aas.net.cn/cn/article/id/14010?viewType=HTML
[21]
http://www.aas.net.cn/cn/article/id/14074?viewType=HTML
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔