 加载中…
加载中…有界扰动下约束非线性系统鲁棒经济模型预测控制
引用本文
何德峰, 韩平, 王青松.
有界扰动下约束非线性系统鲁棒经济模型预测控制. 自动化学报, 2022,
He De-Feng, Han Ping, Wang
Qing-Song. Robust economic MPC of constrained nonlinear systems
with bounded disturbances. Acta Automatica Sinica,
2022,
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190879?viewType=HTML
文章简介
关键词
模型预测控制, 非线性系统, 经济优化, 微分对策, 输入到状态稳定性
摘
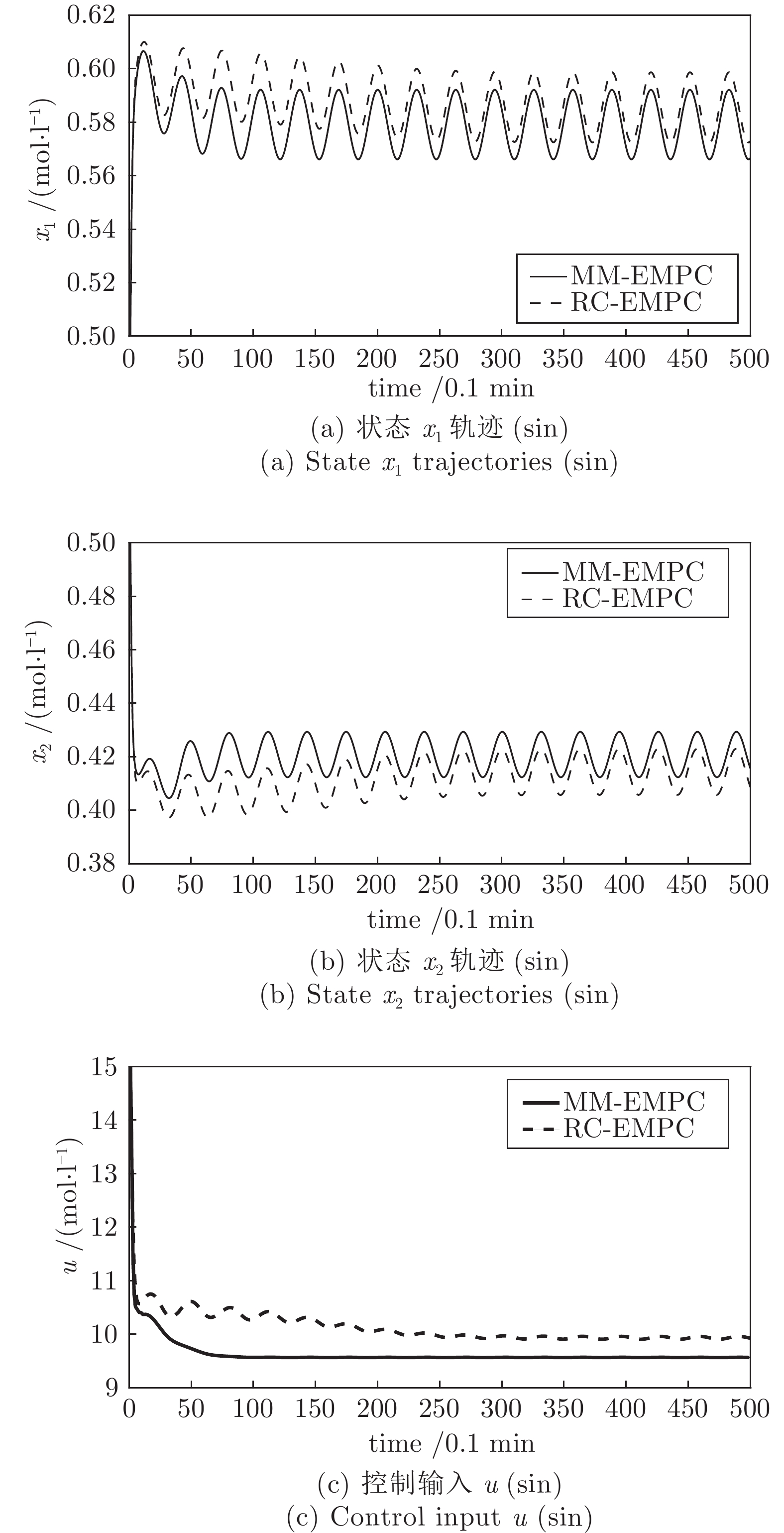
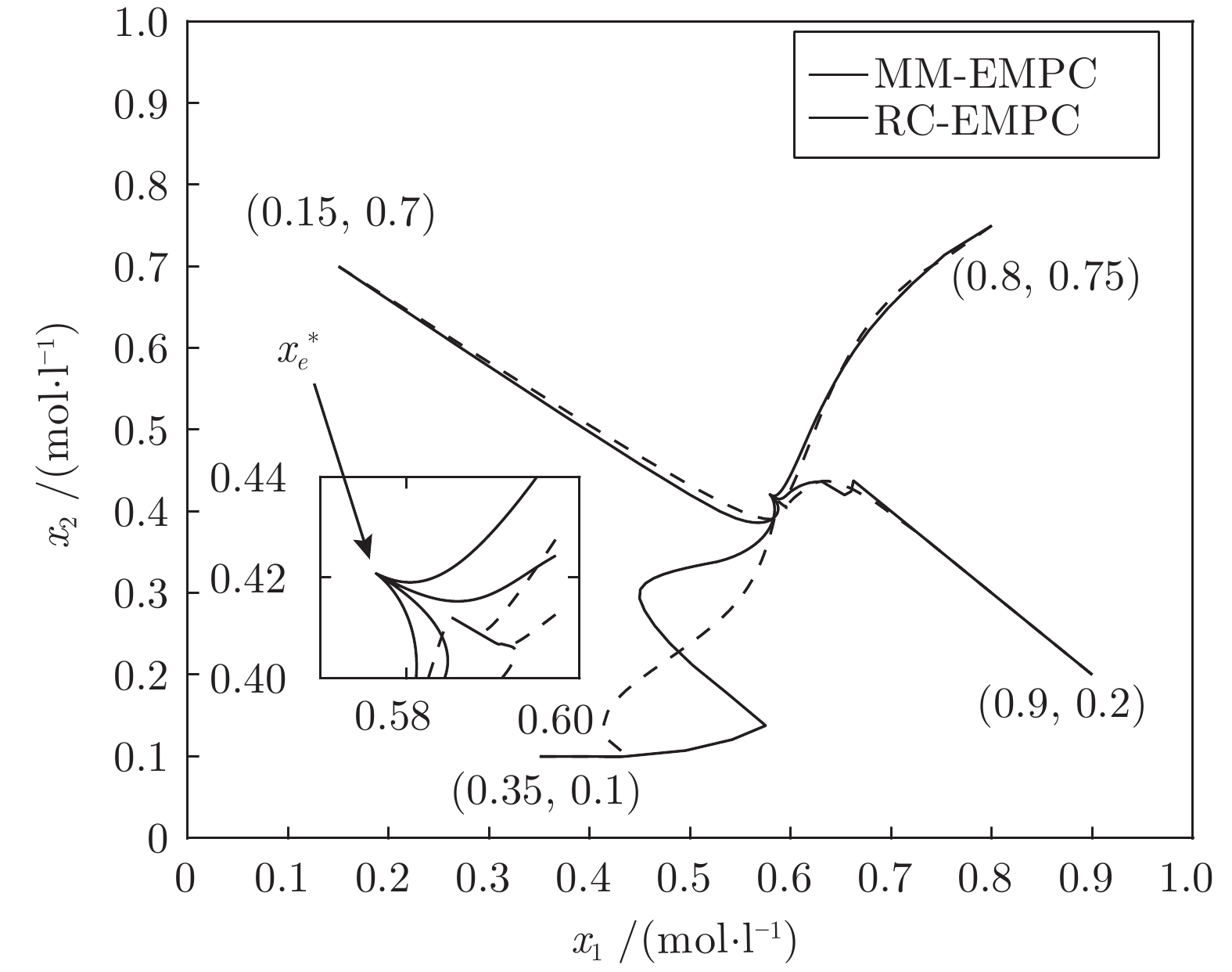
针对未知但有界扰动下约束非线性系统, 提出一种新的鲁棒经济模型预测控制(Economic model predictive control, EMPC)策略, 保证闭环系统对扰动输入具有输入到状态稳定性(Input-to-state stability, ISS). 基于微分对策原理, 分别优化经济目标函数和关于最优经济平衡点的鲁棒稳定性目标函数, 其中经济最优性与鲁棒稳定性是具有冲突的两个控制目标. 利用鲁棒稳定性目标最优值函数构造EMPC优化的隐式收缩约束, 建立鲁棒EMPC的递推可行性和闭环系统关于最优经济平衡点相对于有界扰动输入到状态稳定性结果. 最后以连续搅拌反应器为例, 对比仿真验证本文策略的有效性.
引
近年来, 经济模型预测控制(Economic model predictive control, EMPC)在工业界和学术界引起了广泛关注. 作为一种新近发展的先进控制技术, EMPC有望成为解决复杂系统节能、降耗和增效优化控制问题的重要手段, 目前已应用于能源、造纸、车辆等系统的能效优化控制. 除具有常规模型预测控制 (Model predictive control, MPC)的显式处理约束和多变量控制的优点外, EMPC还能优化“经济”类目标函数, 通常这类函数不是设定值跟踪偏差的正定函数, 而是系统状态和控制变量的非凸或非正定函数. 因此, 把以设定值跟踪偏差的正定函数为优化目标的常规MPC称为目标跟踪MPC, 而不以跟踪偏差的正定函数为优化目标的MPC统称为经济MPC. 现有研究表明: 经济最优性目标与闭环系统的稳定性目标具有一定的冲突性, 因此近年来EMPC的稳定性综合策略得到了广泛研究.
为建立EMPC关于经济平衡点的稳定性, 一种主要方法是构造基于经济优化目标函数的Lyapunov函数. 例如, 使用终端等式约束和强对偶性假设, 定义经济目标函数的旋转代价函数并将其作为闭环系统的一个Lyapunov函数, 而引入广义终端等式约束, 建立了经济性能变化下的递推可行性与闭环系统的有界稳定性. 进一步, 采用严格耗散性条件、终端不等式约束和终端代价函数代替, 降低了EMPC稳定性综合策略的保守性. 在无终端约束EMPC策略中, 闭环轨迹在足够长的预测时域情况下收敛到平衡点的邻域. 虽然无终端约束增大了闭环系统的吸引域, 但长时域预测将大大增加了在线优化的计算负担. 进一步, EMPC稳定性和经济性是一对存在冲突的控制目标, 且稳定性和经济性目标无法统一度量, 难以通过权重标定. 对此, 从多目标优化控制角度, 考虑非线性系统强对偶性或耗散性条件难以满足情况, 文献[20-21]通过构造稳定性收缩约束, 建立闭环系统关于最优经济平衡点的渐近稳定性.
实际系统总是存在不确定扰动, 现有EMPC策略通常难以保证受扰系统的可行性和稳定性. 对于目标跟踪MPC, 目前已有较多鲁棒稳定性结果, 主要包括本质鲁棒MPC、Tube鲁棒MPC以及min-max MPC等, 其中min-max MPC采用微分对策原理, 在使最坏扰动输入情况下系统的性能指标上界达到最小. 相比于本质鲁棒MPC和Tube鲁棒MPC, min-max MPC能大大降低鲁棒MPC的保守性, 但会增加优化问题的在线计算量. 为降低min-max MPC的在线计算量, 文献[30]采用仿射输入结构, 使MPC含有抑制扰动的闭环成分和易于求解的开环优化. 另一方面, 输入到状态稳定性(Input-to-state stability, ISS)成为分析不确定系统鲁棒稳定性的一个有效工具, 并应用到了EMPC鲁棒性研究, 如文献[33-34]采用强对偶性假设和约束紧缩方法, 证明了周期性扰动下线性系统EMPC闭环收敛性, 文献[35]获得了非线性系统EMPC的有界稳定性结果, 提高了经济性能优化的灵活性, 文献[36]将稳定性目标和经济性目标相加, 证明EMPC线性系统关于经济目标的最大值是ISS的, 文献[37]施加保证鲁棒稳定性的显式收缩约束, 提出两种非线性系统鲁棒EMPC算法, 文献[38]提出Lipschitz连续非线性系统的隐式收缩鲁棒EMPC策略, 提高了系统的平均经济性能.
本文针对含有未知有界扰动的不确定非线性系统, 提出一种新的具有递推可行性以及ISS保证的鲁棒EMPC策略. 该策略明确考虑经济最优性和鲁棒稳定性控制目标的矛盾特点, 采用微分对策原理在线滚动优化计算这对冲突目标的min-max问题. 离线计算最优经济平衡点, 并利用状态与该平衡点的偏差定义鲁棒稳定性目标函数, 而经济目标函数则由系统的经济性能给定. 通过特殊设计EMPC优化问题的隐式收缩约束, 并在鲁棒稳定性目标优化问题中引入一个新约束, 保证EMPC优化的递推可行性和闭环系统关于不确定扰动输入的ISS. 相比现有鲁棒EMPC策略, 本文首先建立了约束非线性系统具有ISS的鲁棒EMPC策略; 其次, EMPC递推可行性和鲁棒稳定性无需强对偶性或耗散性假设条件, 从而扩大了鲁棒 EMPC的应用范围; 最后, 采用微分对策原理得到了保守性更低的容许扰动上界. 采用一个受扰非线性连续搅拌釜反应器(Continuous stirred tank reactor, CSTR)的仿真实例, 验证本文提出策略的有效性与优越性.
{kind=link}
图
{kind=link}
图
作者简介
何德峰
浙江工业大学信息工程学院教授.
2008年获得中国科学技术大学自动化系博士学位. 主要研究方向为智能系统预测控制理论与应用.
本文通信作者.
E-mail: hdfzj@zjut.edu.cn
韩
浙江工业大学信息工程学院硕士研究生. 主要研究方向为非线性系统经济模型预测控制.
E-mail: hanping@zjut.edu.cn
王青松
浙江工业大学信息工程学院硕士研究生. 主要研究方向为非线性系统经济模型预测控制.
E-mail: 2111903053@zjut.edu.cn
相关文章
[1]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160684?viewType=HTML
[2]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170251?viewType=HTML
[3]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c170112?viewType=HTML
[4]
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150234?viewType=HTML
[5]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.01958?viewType=HTML
[6]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.00001?viewType=HTML
[7]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00222?viewType=HTML
[8]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00390?viewType=HTML
[9]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2011.00629?viewType=HTML
[10]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.00573?viewType=HTML
[11]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01115?viewType=HTML
[12]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2009.00272?viewType=HTML
[13]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2008.00215?viewType=HTML
[14]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2008.01140?viewType=HTML
[15]
http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2008.00798?viewType=HTML
[16]
http://www.aas.net.cn/cn/article/id/13769?viewType=HTML
[17]
http://www.aas.net.cn/cn/article/id/16200?viewType=HTML
[18]
http://www.aas.net.cn/cn/article/id/15632?viewType=HTML
[19]
http://www.aas.net.cn/cn/article/id/14673?viewType=HTML
[20]
http://www.aas.net.cn/cn/article/id/16113?viewType=HTML
[21]
http://www.aas.net.cn/cn/article/id/14262?viewType=HTML
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔