 加载中…
加载中…工业机器人三维重复定位精度测试系统
标签:
工业机器人高晟传感激光位移传感器三维重复定位精度测试 |
分类: 智能制造 |
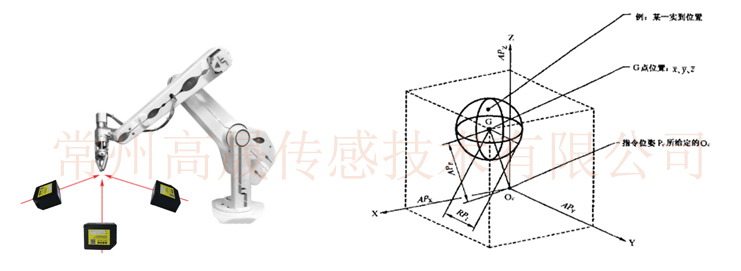
应用背景
测量方案
http://www.goldensen.com/upfile/201612/2016122059903537.jpg
{kind=link}
图一:三维重复定位精度测试系统
规格指标
规测量范围: 40*40*40mm至110*110*110mm
分辨率:±0.2um,±0.5um,±1um,±2.5um
单点重复精度:±1.7um,±4.3um,±6.9um,±17um
空间绝对精度:±16um,±34um,±43um,±86um
采样频率:X,Y,Z轴1000Hz
输出频率:X,Y,Z轴100Hz
触发方式:手动触发,IO触发,阈值触发
传感器防护等级:IP67
系统支架体积:500*500*1700mm
工作电源:24V,3A
工作温度:0-50℃
产品特点
(2) 精确、快速的测量机器人的重复定位精度,自动记录测量结果;
(3) 系统组成为高精度激光位移传感器+工控机,进行数据传输,多个激光位移传感器合成一个串口线连接到工控机。
产品优势
http://www.goldensen.com/upfile/201612/2016122058523637.png
{kind=link}
软件功能介绍
(2) 通讯参数设置,如串口端口、波特率、发送周期等;
(3)采集触发方式选择,包括控制模块触发(接收机器人控制系统指令)、阈值触发、采集点控制触发以及手动模式,某些方式可以联合起来使用;
(4) 测量数据计算方式选择,主要指阈值触发方式中测量范围、测量次数、停止步数、停止范围参数选择;
(5) 测量过程中,可每一步测量结束后给机器人控制系统发送指令或数据;
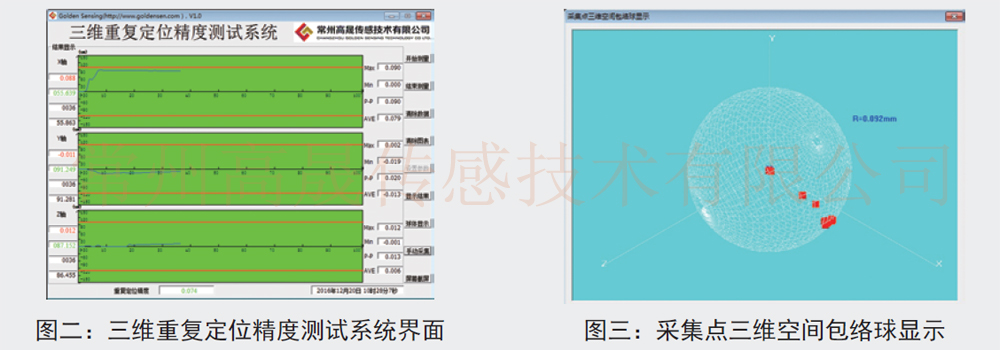
(6) 测量结束将测量结果列表显示,可列表显示多次测量结果;
(7)测量结果自动记录到电脑excel文件中,包括每一次回到原点时X轴、Y轴、Z轴的测量值以及机器人空间位移距离,还有整个测量下来的最大最小值、平均值、峰峰值以及位置重复精度,还可以记录每一次接收到机器人控制系统的指令到机器人达到稳定状态的稳定时间数据等;
(8) 可根据客户需求扩展上位机软件功能,如改变通信接口方式、实时接收和发送客户信号或数据、客户要求的测量数据计算并自动记录。
http://www.goldensen.com/upfile/201612/2016122060439717.jpg
{kind=link}
通讯接口
可以和机器人控制系统实时通信,接受机器人控制系统的指令,向机器人控制系统发送指令或传输数据,可以选择不同的通讯接口:
(1) 串口通讯:RS485、422或232通讯;
(2) 开关量通讯:接收或发出开关量指令;
(3) 以太网通讯:如采用Modbus Tcp通讯。
行业应用
http://www.goldensen.com/upfile/201612/2016122060788441.jpg
{kind=link}
应用视频
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔