 加载中…
加载中…多旋翼定高模式PID控制算法详解
标签:
px4高度控制 |
在有高度信息(无论是超声波、气压计还是多传感器融合获取的)的情况下,如何用PID算法做PID控制。
以下所描述的参考开源pixhawk飞控的思路,以伪代码方式大概简单描述。
1)程序中自然是判断是否已经进入定高模式。进入定高后,先根据油门杆量,算出高度方向的速度设定值(爬升率/下降率)。注:定高模式下,油门杆不再直接控制电机转速,而是Z轴方向的速度,杆量在中位,自然不再有速度,因此高度方向达到悬停。
这三行代码主要是进行归一化,并进行限速。
Thr=THROTTLE / 1000.0f;
ZRate_sp= -Scale (Thr-0.5f,0.5f,ALT_CTRL_Z_DB);
ZRate_sp = ZRate_sp * ALT_VEL_MAX;
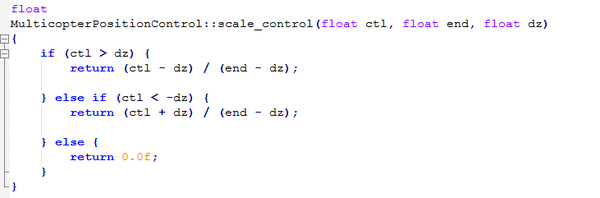
其中scale函数主体部分如下所示
https://pic4.zhimg.com/af9a204937cc0625cfb9e66f3be054cf_b.pngALT_CTRL_Z_DB为定高模式的死区大小。
{kind=link}
2)计算高度控制的设定值。注:NED系,高度方向,向下是正,所以是- z。
Alt_sp = - z;
Alt_sp -= spZMoveRate * dt;
3)进行位置控制器的运算,是P加前馈控制,加上前馈控制,响应会快些。
Z_pos_err= -( Alt_sp - alt);
Z_pos_VelSp = Z_pos_err * alt_PID.P + ZRate_sp * ALT_FEED_FORWARD;
位置控制器的输出是Z轴的速度设定值。所以接下来,就是速度控制器,主要是PID控制。
4)速度控制器
velZerr = Z_pos_VelSp - velZ;
thrustZInt += velZerr * alt_vel_PID.I * dt;
valZerrD = (ZRate_sp - velZ) * alt_PID.P - (velZ - velZPrev) / dt;
velZPrev=velZ;
Z_Sp= velZerr * alt_vel_PID.P + valZErrD * alt_vel_PID.D + thrustZInt;
5)将油门的设定值,转换成电机输出。
Throttle=(- Z_Sp) * 1000;
本文只是大概描述了下思路,所有PID的参数都是要慢慢调的,具体还有部分细节,比如需要对设定值进行限幅啊、积分什么时候起作用,什么时候需要重置等等,详情参考pixhawk源码中的mc_pos_control。整个控制回路包含了两层,分别是位置、速度控制,需要Z轴方向的高度、速度信息(参见位置估计,传感器的数据融合、组合导航获得NED系下的位置、速度)。
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔