 加载中…
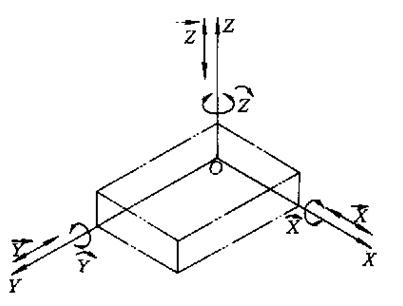
加载中…六自由度定位原理
|
工件的六点定位原理及六点定位应用过程中的注意事项 |
|
|
http://www.busnc.com/flash/jiaju/liudiandingwei.files/image014.jpg
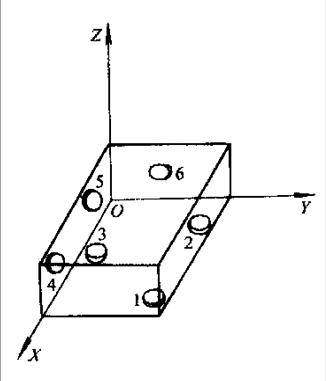
图4
定位,就是限制自由度。如图5所示的长方体工件,欲使其完全定位,可以设置六个固定点,工件的三个面分别与这些点保持接触,在其底面设置三个不共线的点1、2、3(构成一个面),限制工件的三个自由度:http://www.busnc.com/flash/jiaju/liudiandingwei.files/image002.gif自由度。于是工件的六个自由度便都被限制了。这些用来限制工件自由度的固定点,称为定位支承点,简称支承点。 用合理分布的六个支承点限制工件六个自由度的法则,称为六点定位原理。 在应用“六点定位原理”分析工件的定位时,应注意以下几点:
(1)
(2)
(3) |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔