 加载中…
加载中…Opencv学习笔记(四)霍夫变换
标签:
霍夫变换线段坐标系边缘检测步长杂谈 |
分类: opencv |
{kind=link}
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 )
- #include
"opencv2/opencv.hpp" - #define
PI 3.1415926 -
- int
main( intargc, char*argv[]) -
{
-
cv::Mat image = cv::imread ( -
cv::Mat result; -
cv::cvtColor (image,result,CV_BGRA2GRAY); -
cv::Mat contours; -
-
cv::Canny (result,contours,125,350); -
std::vector<cv::Vec2f> lines; -
-
-
cv::HoughLines (contours,lines,1,PI/180,80); -
std::vector<cv::Vec2f>::const_iterator it = lines.begin (); -
std::cout<<lines.size ()<<std::endl; -
!= lines.end()){ -
rho = (*it)[0]; -
theta = (*it)[1]; -
-
-
cv::Point pt1(rho/cos(theta),0); -
cv::Point pt2((rho-result.rows*sin(theta))/cos(theta),result.rows); -
cv::line(image,pt1,pt2,cv::Scalar(255),1); -
} -
{ -
-
cv::Point pt1(0,rho/sin(theta)); -
cv::Point pt2(result.cols,(rho-result.cols*cos(theta)/sin(theta))); -
cv::line(image,pt1,pt2,cv::Scalar(255),1); -
} -
++it; -
} -
cv::namedWindow ( -
cv::imshow( -
cv::waitKey (0); - }
#include "opencv2/opencv.hpp"
#define PI 3.1415926
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread ("road.jpg");
cv::Mat result;
cv::cvtColor (image,result,CV_BGRA2GRAY);
cv::Mat contours;
//边缘检测
cv::Canny (result,contours,125,350);
std::vector<cv::Vec2f> lines;
//霍夫变换,获得一组极坐标参数(rho,theta),每一对对应一条直线,保存到lines
//第3,4个参数表示在(rho,theta)坐标系里横纵坐标的最小单位,即步长
cv::HoughLines (contours,lines,1,PI/180,80);
std::vector<cv::Vec2f>::const_iterator it = lines.begin ();
std::cout<<lines.size ()<<std::endl;
while(it != lines.end()){
float rho = (*it)[0];
float theta = (*it)[1];
if(theta<PI/4.||theta>3.*PI/4){
//画交点在上下两边的直线
cv::Point pt1(rho/cos(theta),0);
cv::Point pt2((rho-result.rows*sin(theta))/cos(theta),result.rows);
cv::line(image,pt1,pt2,cv::Scalar(255),1);
}
else {
//画交点在左右两边的直线
cv::Point pt1(0,rho/sin(theta));
cv::Point pt2(result.cols,(rho-result.cols*cos(theta)/sin(theta)));
cv::line(image,pt1,pt2,cv::Scalar(255),1);
}
++it;
}
cv::namedWindow ("hough");
cv::imshow("hough",image);
cv::waitKey (0);
}
检测结果示例:
http://hi.csdn.net/attachment/201203/15/0_1331805815ylDF.gif
{kind=link}
void HoughLinesP(InputArray image,
OutputArray lines, double rho, double theta, int threshold,
dou-
ble minLineLength=0, double maxLineGap=0 )
这个方法是通过概率霍夫变换实现的:
1)随机获取边缘图片上的前景点,映射到级坐标系画曲线;
2)当极坐标系里面有交点达到最小投票数,将该点对应x-y坐标系的直线L找出来;
3)搜索边缘图片上前景点,在直线L上的点(且点与点之间距离小于maxLineGap的)连成线段,然后这些点全部删除,并且记录该线段的参数,就是起始点和终止点啦~~~~~~~~~~~~~~~~~~~(当然这里线段长度要满足最小长度的,否则就不用记录了)
4)重复1),2),3)
- #include
"opencv2/opencv.hpp" - #define
PI 3.1415926 -
- class
LineFinder{ - private:
-
直线对应的点参数向量 -
std::vector<cv::Vec4i> lines; -
-
deltaRho; -
deltaTheta; -
判断是直线的最小投票数 -
minVote; -
判断是直线的最小长度 -
minLength; -
同一条直线上点之间的距离容忍度 -
maxGap; - public:
-
-
LineFinder() : deltaRho(1), deltaTheta(PI/180), -
minVote(10), minLength(0.), maxGap(0.) {} -
设置步长 -
setAccResolution( doubledRho, doubledTheta) { -
deltaRho= dRho; -
deltaTheta= dTheta; -
} -
设置最小投票数 -
setMinVote( intminv) { -
minVote= minv; -
} -
设置最小线段长度和线段间距容忍度 -
setLineLengthAndGap( doublelength, doublegap) { -
minLength= length; -
maxGap= gap; -
} -
-
-
std::vector<cv::Vec4i> findLines(cv::Mat& binary) { -
lines.clear(); -
cv::HoughLinesP(binary,lines, deltaRho, deltaTheta, minVote,minLength, maxGap); - //
return lines; -
} -
-
画线段 -
drawDetectedLines(cv::Mat &image, cv::Scalar color=cv::Scalar(255,255,255)) { -
std::vector<cv::Vec4i>::const_iterator it2=lines.begin(); -
(it2!=lines.end()) { -
cv::Point pt1((*it2)[0],(*it2)[1]); -
cv::Point pt2((*it2)[2],(*it2)[3]); -
cv::line( image, pt1, pt2, color); -
++it2; -
} -
} -
};
-
-
- int
main( intargc, char*argv[]) -
{
-
cv::Mat image = cv::imread ( -
cv::Mat result; -
cv::cvtColor (image,result,CV_BGRA2GRAY); -
cv::Mat contours; -
-
cv::Canny (result,contours,125,350); -
LineFinder finder; -
finder.setMinVote (80); -
finder.setLineLengthAndGap (100,20); -
finder.findLines (contours); -
finder.drawDetectedLines (image); -
-
cv::namedWindow ( -
cv::imshow( -
cv::waitKey (0); -
}
#include "opencv2/opencv.hpp"
#define PI 3.1415926
class LineFinder{
private:
// 直线对应的点参数向量
std::vector<cv::Vec4i> lines;
//步长
double deltaRho;
double deltaTheta;
// 判断是直线的最小投票数
int minVote;
// 判断是直线的最小长度
double minLength;
// 同一条直线上点之间的距离容忍度
double maxGap;
public:
//初始化
LineFinder() : deltaRho(1), deltaTheta(PI/180),
minVote(10), minLength(0.), maxGap(0.) {}
// 设置步长
void setAccResolution(double dRho, double dTheta) {
deltaRho= dRho;
deltaTheta= dTheta;
}
// 设置最小投票数
void setMinVote(int minv) {
minVote= minv;
}
// 设置最小线段长度和线段间距容忍度
void setLineLengthAndGap(double length, double gap) {
minLength= length;
maxGap= gap;
}
//寻找线段
std::vector<cv::Vec4i> findLines(cv::Mat& binary) {
lines.clear();
cv::HoughLinesP(binary,lines, deltaRho, deltaTheta, minVote,minLength, maxGap);
// return lines;
}
// 画线段
void drawDetectedLines(cv::Mat &image, cv::Scalar color=cv::Scalar(255,255,255)) {
std::vector<cv::Vec4i>::const_iterator it2=lines.begin();
while (it2!=lines.end()) {
cv::Point pt1((*it2)[0],(*it2)[1]);
cv::Point pt2((*it2)[2],(*it2)[3]);
cv::line( image, pt1, pt2, color);
++it2;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread ("road.jpg");
cv::Mat result;
cv::cvtColor (image,result,CV_BGRA2GRAY);
cv::Mat contours;
//边缘检测
cv::Canny (result,contours,125,350);
LineFinder finder;
finder.setMinVote (80);
finder.setLineLengthAndGap (100,20);
finder.findLines (contours);
finder.drawDetectedLines (image);
cv::namedWindow ("hough");
cv::imshow("hough",image);
cv::waitKey (0);
}
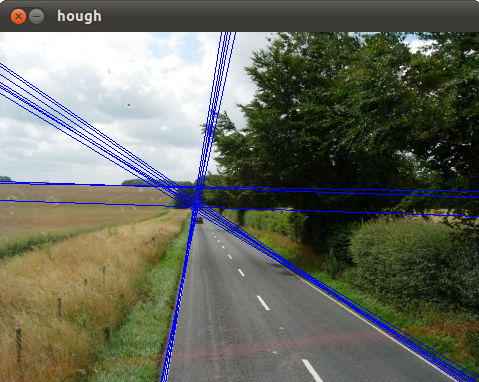
测试结果如下:
http://hi.csdn.net/attachment/201203/15/0_13318079100Kr0.gif
{kind=link}
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔