 加载中…
加载中…图像卷积运算
标签:
杂谈 |
分类: 遥感 |
Convolution
Convolution is the most important and fundamental concept in
signal processing and analysis. By using convolution, we can
construct the output of system for any arbitrary input signal, if
we know the impulse response of system.
How is it possible that knowing only impulse response of system can
determine the output for any given input signal? We will find out
the meaning of convolution.
Related Topics: Window
Filters
Download: conv1d.zip,
conv2d.zip
- Definition
- Impulse Function Decomposition
- Impulse Response
- Back to the Definition
- Convolution in 1D
- C++ Implementation for Convolution 1D
- Convolution in 2D
- Separable Convolution 2D
- C++ Algorithm for Convolution 2D
Definition
First, let's see the mathematical definition of convolution in
discrete time domain. Later we will walk through what this equation
tells us.
(We will discuss in discrete time domain only.)
http://www.songho.ca/dsp/convolution/files/conv1d_eq01.gif
where x[n] is input signal,
h[n] is impulse response,
and y[n] is output. *
denotes convolution. Notice that we multiply the terms of
x[k] by the terms of a
time-shifted h[n] and add
them up.
The keystone of understanding convolution is laid behind impulse
response and impulse decomposition.
{kind=link}
Impulse Function Decomposition
In order to understand the meaning of convolution, we are going to start from the concept of signal decomposition. The input signal is decomposed into simple additive components, and the system response of the input signal results in by adding the output of these components passed through the system.
In general, a signal can be decomposed as a weighted sum of basis signals. For example, in Fourier Series, any periodic signal (even rectangular pulse signal) can be represented by a sum of sine and cosine functions. But here, we use impulse (delta) functions for the basis signals, instead of sine and cosine.
Examine the following example how a signal is decomposed into a set of impulse (delta) functions. Since the impulse function, δ[n] is 1 at n=0, and zeros at n ≠ 0. x[0] can be written to 2·δ[n]. And, x[1] will be 3·δ[n-1], because δ[n-1] is 1 at n=1 and zeros at others. In same way, we can write x[2] by shifting δ[n] by 2, x[2] = 1·δ[n-2]. Therefore, the signal, x[n] can be represented by adding 3 shifted and scaled impulse functions.
{kind=link}
In general, a signal can be written as sum of
scaled and shifted delta functions;
http://www.songho.ca/dsp/convolution/files/conv1d_eq03.gif
{kind=link}
Impulse Response
Impulse response is the output of a system resulting from an
impulse function as input.
And it is denoted as h[n].
http://www.songho.ca/dsp/convolution/files/conv_img02.gif
{kind=link}
If the system is
time-invariant, the response of a time-shifted impulse function
is also shifted as same amount of time.
http://www.songho.ca/dsp/convolution/files/conv_img03.gif
For example, the impulse response of δ[n-1] is h[n-1]. If we know the impulse response
h[n], then we can
immediately get the impulse response h[n-1] by shifting h[n] by +1. Consequently, h[n-2] results from shifting
h[n] by +2.
{kind=link}
If the system is linear
(especially scalar rule), a scaled in input signal causes an
identical scaling in the output signal.
http://www.songho.ca/dsp/convolution/files/conv_img04.gif
For instance, the impulse response of 3·δ[n] is just multiplying by 3 to h[n].
{kind=link}
If the input has 3 components, for example, a·δ[n] + b·δ[n-1] +
c·δ[n-2], then the output is simply a·h[n] + b·h[n-1] +
c·h[n-2]. This is called additive property of
linear system, thus, it is valid only on the linear
system.
http://www.songho.ca/dsp/convolution/files/conv_img05.gif
{kind=link}
Back to the Definition
By combining the properties of impulse response and impulse
decomposition, we can finally construct the equation of
convolution. In linear
and
time-invariant system, the response resulting from several
inputs can be computed as the sum of the responses each input
acting alone.
http://www.songho.ca/dsp/convolution/files/conv_img06.gif
For example, if input signal is x[n] = 2·δ[n] + 3·δ[n-1] + 1·δ[n-2],
then the output is simply y[n] =
2·h[n] + 3·h[n-1] + 1·h[n-2].
Therefore, we now clearly see that if the input signal is http://www.songho.ca/dsp/convolution/files/conv1d_eq05.gif. Note one condition; convolution works on
the linear
and
time invariant system.
{kind=link}
{kind=link}
To summarize, a signal is decomposed into a set of impulses and the output signal can be computed by adding the scaled and shifted impulse responses.
Furthermore, there is an important fact under convolution; the only thing we need to know about the system's characteristics is the impulse response of the system, h[n]. If we know a system's impulse response, then we can easily find out how the system reacts for any input signal.
Convolution in 1D
Let's start with an example of convolution of 1 dimensional signal, then find out how to implement into computer programming algorithm.
x[n] = { 3, 4, 5 }
h[n] = { 2, 1 }
x[n] has only non-zero values at n=0,1,2, and impulse response, h[n] is not zero at n=0,1. Others which are not listed are all zeros.
{kind=link}
{kind=link}
One thing to note before we move on: Try to figure out yourself how this system behaves, by only looking at the impulse response of the system. When the impulse signal is entered the system, the output of the system looks like amplifier and echoing. At the time is 0, the intensity was increased (amplified) by double and gradually decreased while the time is passed.
From the equation of convolution, the output signal y[n] will be http://www.songho.ca/dsp/convolution/files/conv1d_eq05.gif.
Let's compute manually each value of y[0], y[1], y[2],
y[3], ...
http://www.songho.ca/dsp/convolution/files/conv1d_eq06.gif
http://www.songho.ca/dsp/convolution/files/conv1d_eq07.gif
http://www.songho.ca/dsp/convolution/files/conv1d_eq08.gif
http://www.songho.ca/dsp/convolution/files/conv1d_eq09.gif
http://www.songho.ca/dsp/convolution/files/conv1d_eq10.gif
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Notice that y[0] has only
one component, x[0]h[0], and others are omitted,
because others are all zeros at k ≠
0. In other words, x[1]h[-1] = x[2]h[-2] =
0. The above equations also omit the terms if they are
obviously zeros.
If n is larger than and equal to 4,
y[n] will be zeros. So we
stop here to compute y[n]
and adding these 4 signals (y[0],
y[1], y[2], y[3]) produces the output
signal y[n] = {6, 11, 14,
5}.
Let's look more closely the each output. In order to see a pattern clearly, the order of addition is swapped. The last term comes first and the first term goes to the last. And, all zero terms are ignored.
y[0] = x[0]·h[0]
y[1] = x[1]·h[0] +
x[0]·h[1]
y[2] = x[2]·h[0] +
x[1]·h[1]
y[3] = x[3]·h[0] + x[2]·h[1]
Can you see the pattern? For example, y[2] is calculated from 2 input samples; x[2] and x[1], and 2 impulse response samples; h[0] and h[1]. The input sample starts from 2, which is same as the sample point of output, and decreased. The impulse response sample starts from 0 and increased.
Based on the pattern that we found, we can write an equation for any sample of the output;
http://www.songho.ca/dsp/convolution/files/conv1d_eq11.gif
where i is any sample point
and k is the number of samples in impulse response.
For instance, if an impulse response has 4 samples, the sample of
output signal at 9 is;
y[9] = x[9]·h[0] +
x[8]·h[1] + x[7]·h[2] +
x[6]·h[3]
Notice the first sample, y[0] has only one term. Based on the
pattern that we found, y[0]
is calculated as:
y[0] = x[0]·h[0] +
x[-1]·h[1]. Because x[-1] is not defined, we simply pad it
to zero.
{kind=link}
C++ Implementation for Convolution 1D
Implementing the convolution algorithm is quite simple. The code snippet is following;
for ( i = 0; i < sampleCount; i++ )
{
y[i] = 0; // set to zero before sum
for ( j = 0; j < kernelCount; j++ )
{
y[i] += x[i - j] * h[j]; // convolve: multiply and accumulate
}
}
However, you should concern several things in the
implementation.
Watch out the range of input signal. You may be out of bound of
input signal, for example, x[-1], x[-2], and so on. You can pad
zeros for those undefined samples, or simply skip the convolution
at the boundary. The results at the both the beginning and end
edges cannot be accurate anyway.
Second, you need rounding the output values, if the output data
type is integer and impulse response is floating point number. And,
the output value may be exceeded the maximum or minimum
value.
If you have unsigned 8-bit integer data type for output signal, the
range of output should be between 0 and 255. You must check the
value is greater than the minimum and less than the maximum
value.
Download the 1D convolution routine and test program.
conv1d.zip
Convolution in 2D
2D convolution is just extension of previous 1D convolution by
convolving both horizontal and vertical directions in 2 dimensional
spatial domain. Convolution is frequently used for image
processing, such as smoothing, sharpening, and edge detection of
images.
The impulse (delta) function is also in 2D space, so δ[m, n] has 1 where m and n is zero
and zeros at m,n ≠ 0. The impulse
response in 2D is usually called "kernel" or "filter" in image
processing.
{kind=link}
The second image is 2D matrix representation of impulse function. The shaded center point is the origin where m=n=0.
Once again, a signal can be decomposed into a sum of scaled and
shifted impulse (delta) functions;
http://www.songho.ca/dsp/convolution/files/conv2d_eq01.gif
For example, x[0, 0] is
x[0, 0]·δ[m, n],
x[1, 2] is x[1, 2]·δ[m-1, n-2], and so on. Note
that the matrices are referenced here as [column, row], not [row,
column]. M is horizontal (column) direction and N is vertical (row)
direction.
{kind=link}
And, the output of linear
and
time invariant system can be written by convolution of input
signal x[m, n], and impulse
response, h[m, n];
http://www.songho.ca/dsp/convolution/files/conv2d_eq02.gif
Notice that the kernel (impulse response) in 2D is center
originated in most cases, which means the center point of a kernel
is h[0, 0]. For example, if
the kernel size is 5, then the array index of 5 elements will be
-2, -1, 0, 1, and 2. The origin is located at the middle of
kernel.
{kind=link}
{kind=link}
Examine an example to clarify how to convolve in 2D space.
Let's say that the size of impulse response (kernel) is 3x3, and
it's values are a, b, c, d,...
Notice the origin (0,0) is located in the center of kernel.
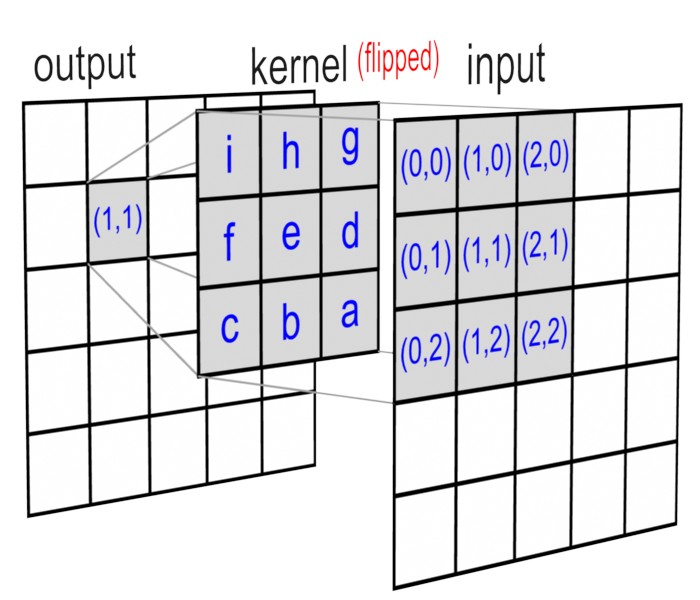
Let's pick a simplest sample and compute convolution, for instance,
the output at (1, 1) will be;
http://www.songho.ca/dsp/convolution/files/conv2d_eq03.gif
It results in sum of 9 elements of scaled and shifted impulse
responses. The following image shows the graphical representation
of 2D convolution.
{kind=link}
{kind=link}
Notice that the kernel matrix is flipped both horizontal and
vertical direction before multiplying the overlapped input data,
because x[0,0] is multiplied
by the last sample of impulse response, h[1,1]. And x[2,2] is multiplied by the first
sample, h[-1,-1].
Exercise a little more about 2D convolution with another example. Suppose we have 3x3 kernel and 3x3 input matrix.
{kind=link}
{kind=link}
{kind=link}
The complete solution for this example is here; Example of 2D Convolution
By the way, the kernel in this example is called Sobel filter, which is used to detect the horizontal edge lines in an image. See more details in the window filters.
Separable Convolution 2D
In convolution 2D with M×N kernel, it requires M×N
multiplications for each sample. For example, if the kernel size is
3x3, then, 9 multiplications and accumulations are necessary for
each sample. Thus, convolution 2D is very expensive to perform
multiply and accumulate operation.
However, if the kernel is separable, then the computation can be
reduced to M + N multiplications.
A matrix is separable if it can be decomposed into (M×1) and (1×N)
matrices.
For example;
http://www.songho.ca/dsp/convolution/files/conv2d_eq04.gif
{kind=link}
And, convolution with this separable kernel is equivalent
to;
http://www.songho.ca/dsp/convolution/files/conv2d_eq05.gif
(Proof of Separable Convolution 2D)
{kind=link}
As a result, in order to reduce the computation, we perform 1D
convolution twice instead of 2D convolution; convolve with the
input and M×1 kernel in vertical direction, then convolve again
horizontal direction with the result from the previous convolution
and 1×N kernel. The first vertical 1D convolution requires M times
of multiplications and the horizontal convolution needs N times of
multiplications, altogether, M+N products.
However, the separable 2D convolution requires additional storage
(buffer) to keep intermediate computations. That is, if you do
vertical 1D convolution first, you must preserve the results in a
temporary buffer in order to use them for horizontal convolution
subsequently.
Notice that convolution is associative; the result is same, even if
the order of convolution is changed. So, you may convolve
horizontal direction first then vertical direction later.
Gaussian smoothing filter is a well-known separable matrix. For
example, 3x3 Gaussian filter is;
{kind=link}
C++ Algorithm for Convolution 2D
We need 4 nested loops for 2D convolution instead of 2 loops in
1D convolution.
// find center position of kernel (half of kernel size) kCenterX = kCols / 2; kCenterY = kRows / 2; for(i=0; i < rows; ++i) // rows { for(j=0; j < cols; ++j) // columns { sum = 0; // init to 0 before sum for(m=0; m < kRows; ++m) // kernel rows { mm = kRows - 1 - m; // row index of flipped kernel for(n=0; n < kCols; ++n) // kernel columns { nn = kCols - 1 - n; // column index of flipped kernel // index of input signal, used for checking boundary ii = i + (m - kCenterY); jj = j + (n - kCenterX); // ignore input samples which are out of bound if( ii >= 0 && ii < rows && jj >= 0 && jj < cols ) out[i][j] += in[ii][jj] * kernel[mm][nn]; } } } }
The above snippet code is simple and easiest way to understand how convolution works in 2D. But it may be the slowest implementation.
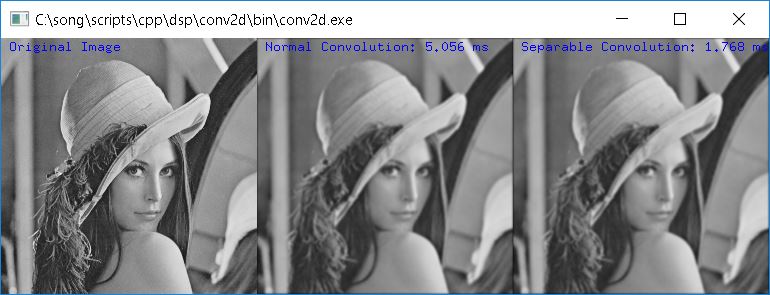
Take a look at a real example; convolution with 256x256 image
and 5x5 Gaussian filter.
http://www.songho.ca/dsp/convolution/files/conv2d_result.jpg
The source image is uncompressed raw, 8-bit (unsigned char)
grayscale image. And again, Gaussian kernel is separable;
{kind=link}
{kind=link}
On my system (AMD 64 3200+ 2GHz), normal convolution took about 10.3 ms and separable convolution took only 3.2 ms. You can see how much separable convolution is faster compared to normal convolution.
Download 2D convolution application and source code here:
conv2d.zip
The program uses OpenGL to render images on the screen.
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔