 加载中…
加载中…宋永端教授等:基于有界时变增益的实用预设时间跟踪控制
标签:
it |
研究背景
近年来,预设时间控制因其设定的收敛时间不依赖于系统初始条件和设计参数而受到了广泛关注。由于收敛速率是评估系统性能最重要的因素之一,对于受时间约束的系统,比如紧急制动、导弹拦截、航空对接等,预设时间控制显得格外重要。预设时间控制的实施通常借助于无穷时变增益技术,其中,控制增益会随着时间趋向于用户自定义的终端时刻而发散到无穷。然而,任何被放大的干扰/噪声可能会使控制器在施行过程中面临数值问题,使得基于无穷增益技术的预设时间控制方法有些受限。同时,基于无穷增益技术的预设时间方法通常只适用于预设时间内存在的控制系统,对于存在于无穷区域的控制系统不太适用。另外,在实际应用过程中,外部干扰和非匹配的系统模型不确定性因素是不可避免的,同时,确保这类系统的高精度以及高速度收敛,并不是一件容易的事情。因此,研究该类系统的高精度与快速收敛控制问题,是非常有意义的。
简言之,现存的预设时间控制的工作中,主要存在三方面的问题:1)预设时间控制的实用性;2)增益的普适性和抵抗非匹配不确定性因素的能力;以及3)超过设定时间后的运算能力。这些问题的并存使得预设时间跟踪控制的实现并非易事。
成果介绍
研究表明,无需系统的任何先验控制增益信息,无论初始条件和其他设计参数如何,系统输出与期望轨迹之间的跟踪误差都能在预先指定的时间内稳定在原点附近。特别地,如果已知控制增益的边界,只需调整控制参数就能任意预先给出原点范围。所开发的解决方案具有真正的实用性和全局性,从而扩大了所提方法的实用性。
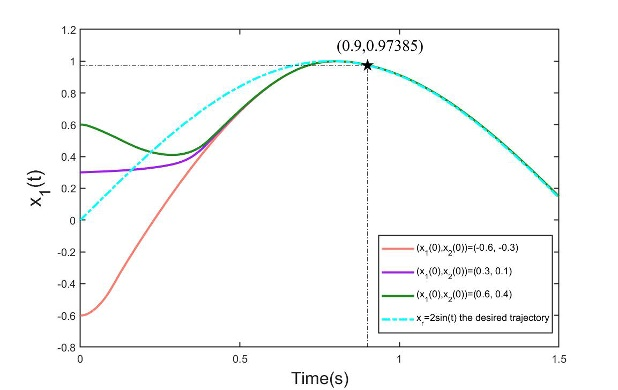
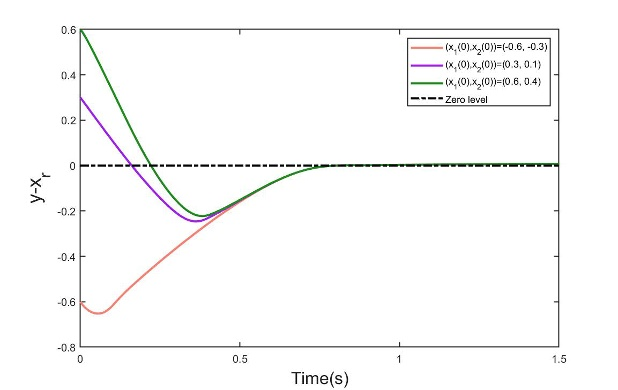
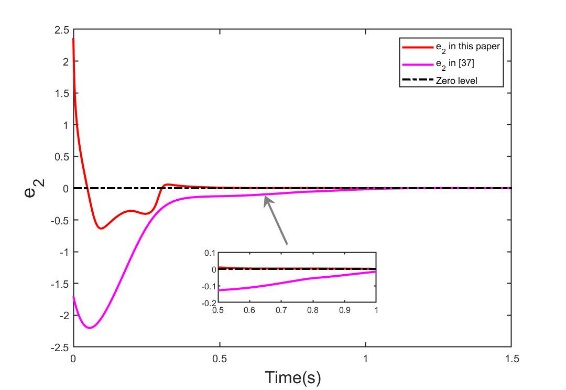
本文在所提控制算法下给出了一类高性能飞机的“机翼-摇晃”不稳定模型的仿真结果,以此说明控制算法的有效性。如图1所示,在不同初始条件下,系统状态能在小于预设时间T*=1.2s内跟踪期望轨迹。同时,精确跟踪能在预设时间后继续保持。图2表明所提控制策略确保良好的跟踪控制性能,在预设时间之前跟踪误差趋近于零,与[37]的控制方案不同。
http://image.sciencenet.cn/home/202402/29/155505ju141vn49v04zmmi.png
{kind=link}
http://image.sciencenet.cn/home/202402/29/155515zsky1bkwsey8mgye.png
{kind=link}
图1
http://image.sciencenet.cn/home/202402/29/155555kucdxpumq7pkkvpy.png
{kind=link}
图2
作者及团队
http://image.sciencenet.cn/home/202402/29/155621gzot4hthbonaa4c4.png
{kind=link}
罗大会,重庆大学控制科学与工程专业博士研究生,研究方向包括预设时间控制、自适应控制、协同控制等。
http://image.sciencenet.cn/home/202402/29/155633d1dkrh7zph8vd5p7.png
{kind=link}
王玉娟,重庆大学教授,2016年博士毕业于重庆大学,主要研究方向包括协同控制、自适应控制、有限/预设时间控制、容错控制等。
http://image.sciencenet.cn/home/202402/29/155643uiggezuecqeuo844.png
{kind=link}
宋永端,重庆大学教授,IEEE/AAIA/CAA Fellow,国际欧亚科学院院士,注册职业工程师(美国),美国教师名人录,中国自动化学会常务理事。现任重庆大学人工智能研究院院长,IEEE Transactions on Neural Networks and Learning Systems主编(Editor-in-Chief),重庆大学智慧工程研究院负责人。1992年获美国田纳西理工大学电气及计算机工程博士学位。曾获教育部/重庆市/中国自动化学会/中国控制与指挥学会等一等奖4项,二等奖2项。主要研究方向包括智能控制、容错控制、自适应协调控制、飞行器导航与控制、可再生能源系统、机器人及智能无人系统、群体智能系统、仿生智能控制系统、协调控制理论及其应用、复杂系统主动安全预警与控制等。
感谢本文作者提供以上简介
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔