 加载中…
加载中…直流无刷电机系列参数
直流无刷电机系列
|
绕组形式————————————————星形
传感器电角度———————————————120°
绝缘等级——————————————————B
环境温度范围—— ———————————-20℃~+50℃
绝缘阻抗 ————————————————100MΩ Min.500V DC
绝缘介电强度 ——————————————500V AC 1minute
| 技术数据(Electrical Specifications): | ||||||||||
| 电机型号 | 额定转速 | 相数 | 磁极数 | 额定电压 | 额定扭矩 | 峰值电流 | 输出功率 | 峰值转矩 | 转动惯量 | 机身长 |
| Model | Rated speed (RPM) | Phaes Number | Poles Number | Voltsge (VDC) | Rated Torque (N.m) | Peak Current (Amps) | Output (Watts) | Peak Torque (N.m) | Rotor Inertia (g.cm2) | Motor LengthL (mm) |
| | ||||||||||
| 42BL9030 | 3000 | 3 | 8 | 24 | 0.3 | 10 | 90 | 0.9 | 120 | 90 |
| 57BL7036 | 3600 | 3 | 8 | 36 | 0.4 | 18.6 | 150 | 1.2 | 170 | 72 |
| 57BL11030 | 3000 | 3 | 8 | 24 | 0.7 | 18 | 210 | 1.8 | 200 | 110 |
| 60BL12030 | 3000 | 3 | 8 | 48 | 0.75 | 20 | 250 | 2.1 | 350 | 120 |
| 80BL13030 | 3000 | 3 | 4 | 36 | 1.2 | 23 | 350 | 3.1 | 500 | 130 |
| 80BL14530 | 3000 | 3 | 4 | 310 | 1.8 | 25 | 550 | 5.5 | 780 | 145 |
| 110BL20020 | 2000 | 3 | 8 | 310 | 6 | 30 | 1200 | 15 | 4500 | 200 |
*以上表中所列仅为代表性产品
注意:峰值转矩仅用于计算电机性能,如长期运行于峰值转矩状态,将导致电机损坏。
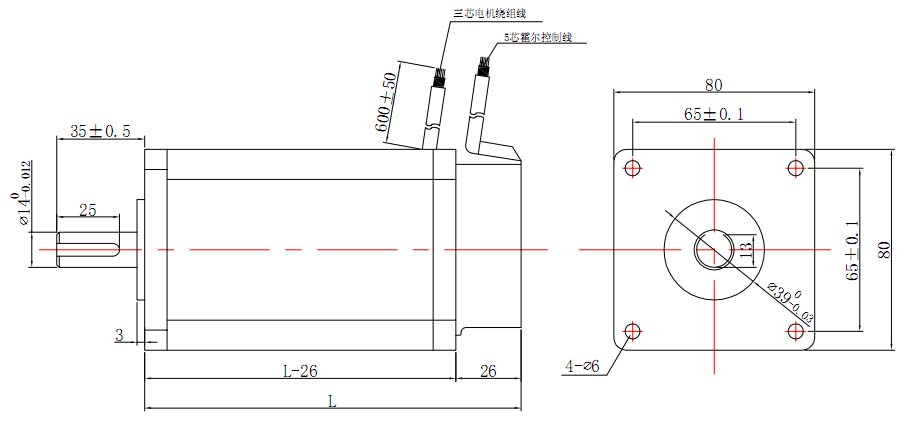
| 电机外形图(Mechanical Dimensions): |
http://www.sitaipu.com/uploads/allimg/130106/1-130106162F5G6.jpg
{kind=link}
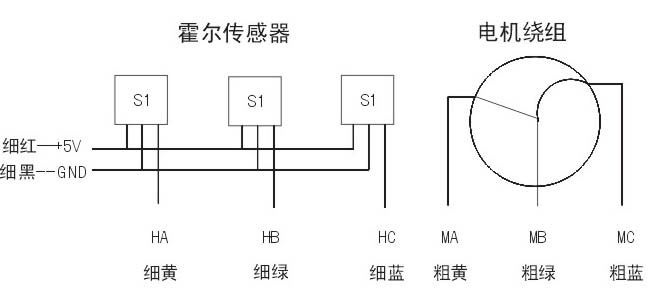
| Wiring Diagram(接线图) |
http://www.sitaipu.com/uploads/allimg/130106/1-13010616300NV.jpg
{kind=link}
{kind=link}
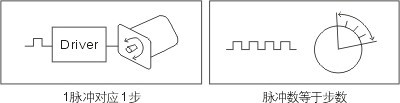
何为步进电机
步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是“数字性”和“误差不积累性”。对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的作用下转动一个固定角度,步进电机的旋转式以此固定角度一步一步运行的。我们可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。利用步进电机没有积累误差的特点,广泛应用于各种开环控制。
http://www.sitaipu.com/images/2013/1-130220095FT53.jpg
{kind=link}
步进电机的种类和特点
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
*
反应式
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
*
永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
*
混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达128倍 (0.014°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
步进电机系列
两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖20-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
两相步进电机命名规则
http://www.sitaipu.com/images/2013/1-130220095J9402.jpg上例表示机座号为57mm,两相混合式,步距角为1.8度,机身长76mm,扭矩1.6Nm,单边出轴的电机。
{kind=link}
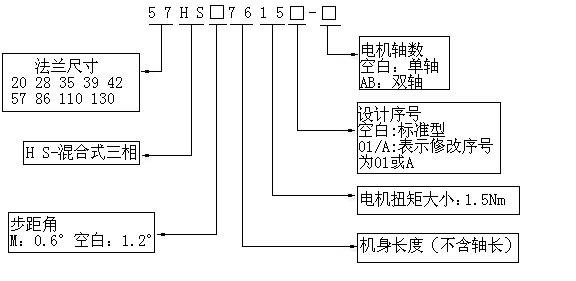
三相步进电机命名规则
http://www.sitaipu.com/images/2013/1-130220095T1356.jpg上例表示机座号为57mm,三相混合式,步距角为1.2度,机身长76mm,扭矩1.5Nm,单边出轴的电机。
{kind=link}
步进驱动器选型指南
步进电机的运行要有一定的电子装置进行驱动,这种装置就是步进驱动器,它是步进系统中核心组件之一。它按照控制器发来的脉冲/方向指令对电机线圈电流进行控制,从而控制电机转轴的位置和速度。
步进驱动器的工作模式
整步、半步、细分(微步)。其主要区别在于电机线圈电流的控制精度。通常步进电机都有低频振动的特点,通过细分设置,可以改善电机低速运行的平稳性。
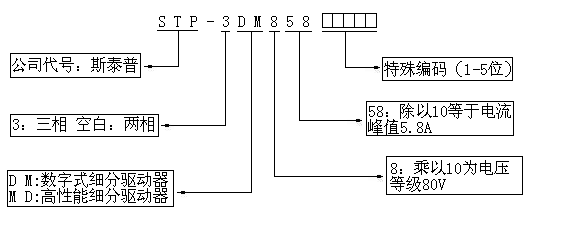
步进电机驱动器命名规则
http://www.sitaipu.com/images/2013/1-13022009593BC.png
{kind=link}
怎样选择步进电机和驱动器
* 判断需多大力矩: 静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
* 判断电机运转速度: 转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。
* 选择电机的安装规格: 如57,86,110等,主要与力矩要求有关。
* 确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
* 根据电机的电流、细分和供电电压选择驱动器。
![]() 喜欢
喜欢
0
![]() 赠金笔
赠金笔